
Model Learning
We are investigating model learning algorithms for non-markovian dynamics such as pneumatic robots under changing dynamics. We developed a new recurrent neural network architecture that can learn such models from uncertain partial observations and used it for forward and inverse model learning. We also work on hybrid models that combine analytical models with learned DNN models.
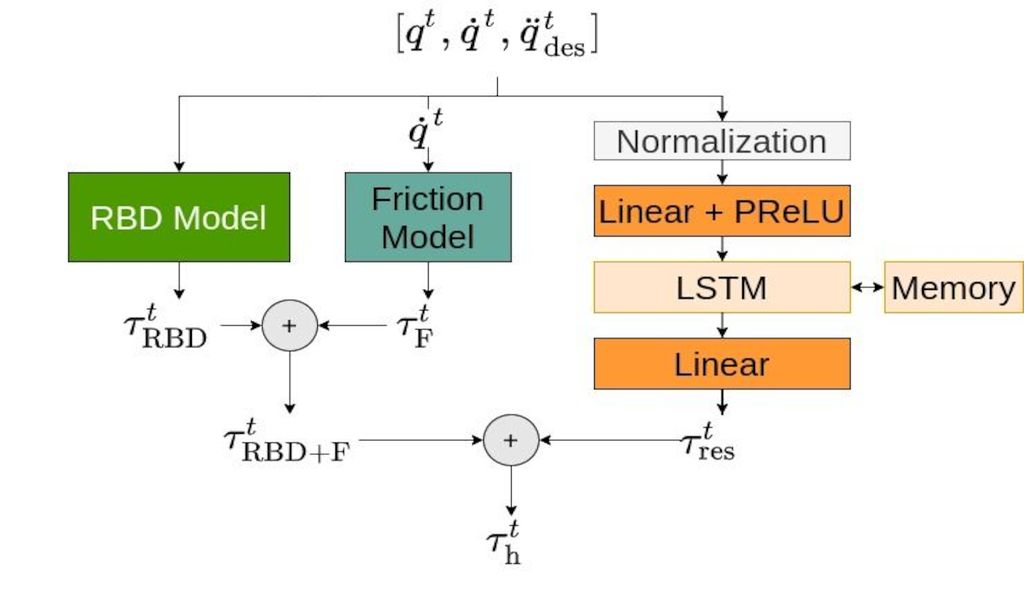
We propose a new formulation for a residual hybrid inverse dynamics model, which combines a fully physically consistent rigid-body dynamics model with a recurrent LSTM and a Coulomb friction function. The model is trained end-to-end using a new formulation of Barycentric Parameters called “Differentiable Barycentric”, which implicitly guarantees all conditions of physical consistency. In our real robot motion tracking experiments we show, that the new model is able to achieve compliant and precise motion tracking on unseen movements.
more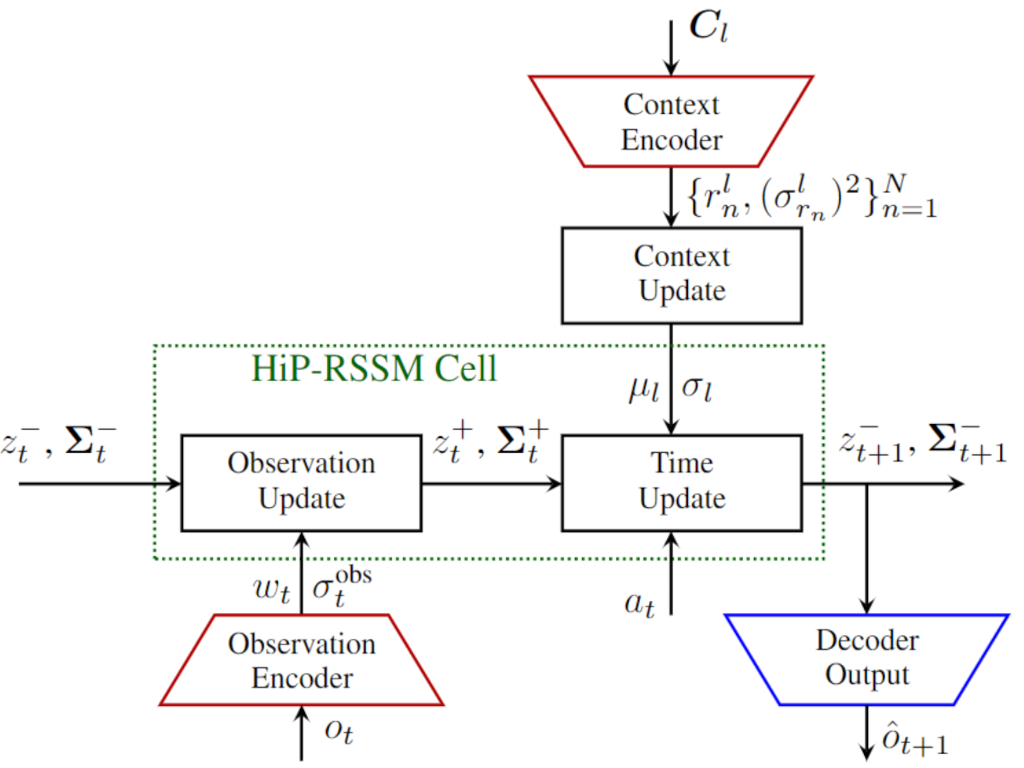
We propose a multi-task deep Kalman model, that can adapt to changing dynamics and environments. The model gives state of the art performance on several robotic benchmarks with non-stationarity with little computational overhead!!!
more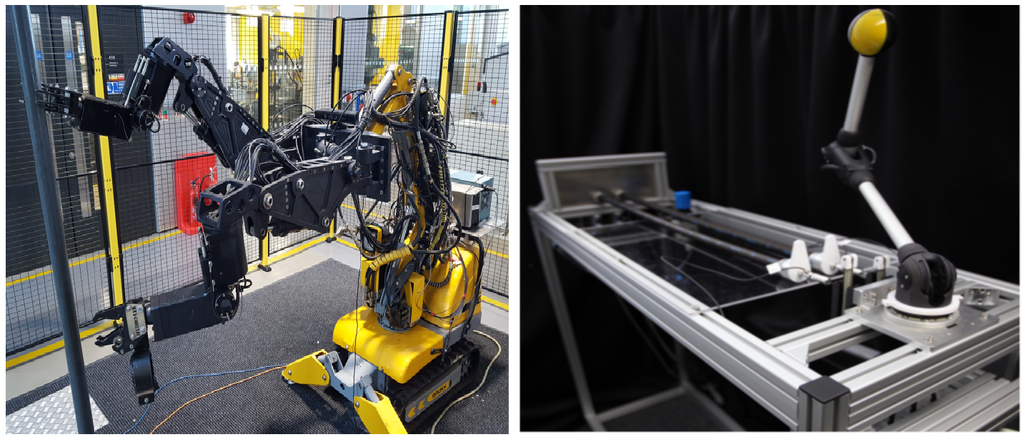
Action conditional probabilistic model inspired by Kalman filter operations in the latent state. Find out how we learn the complex non-markovian dynamics of pneumatic soft robots and large hydraulic robots with this disentangled state and action representation.
more