
Imitation Learning and Interactive Learning
We are investigating new imitation learning methods with a focus on multi-modal behavior and learning from very small training sets. In addition, we try to incorporate interactive human feedback such as preferences in the learning process.
_rdax_98.png)
In this paper we propose a novel algorithm that extends Adversarial Imitation Learning to use preferences as a feedback besides demonstrations. Results show that our method can learn from expert and imperfect demonstrations. Experiments show the method's effectiveness on robotic ma benchmarks.
more_neu_rdax_98.png)
We combine a mixture of movement primitives with a distribution matching objective to learn versatile behaviors that match the expert’s behavior and versatility.
more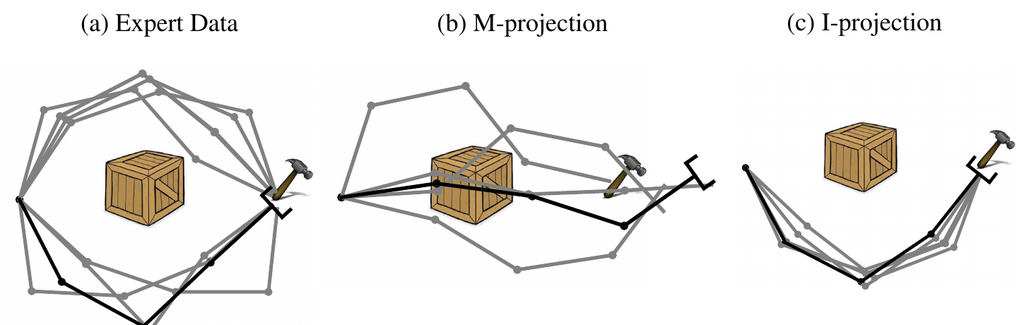
Using the I-Projection for Mixture Density Estimation. Find out why maximum likelihood is not well suited for mixture density modelling and why you should use the I-projection instead.
more