
Movement Representations
We are developing new movement primitive representations based on the Probabilistic Motion Primitive framework and embed these representations into neural network architectures. We are also looking into new deep reinforcement learning algorithms with motion primitives to learn high quality skills for complex tasks.
Movement Primitives (MPs) are a well-known concept to represent and generate modular trajectories. MPs can be broadly categorised into two types: (a) dynamics-based approaches that generate smooth trajectories from any initial state, e. g., Dynamic Movement Primitives (DMPs), and (b) probabilistic approaches that capture higher-order statistics of the motion, e. g., Probabilistic Movement Primitives (ProMPs).
more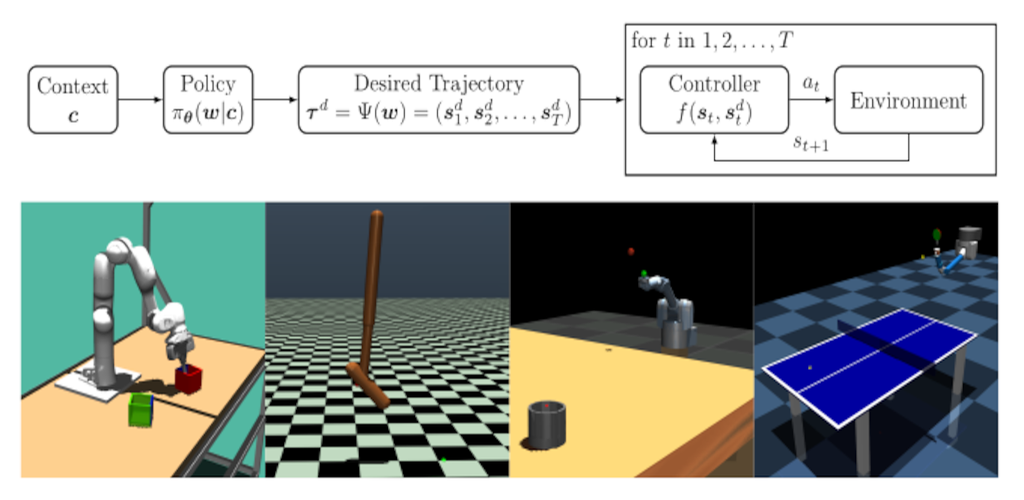
Episode-based reinforcement learning (ERL) algorithms treat reinforcement learning (RL) as a black-box optimization problem where we learn to select a parameter vector of a controller, often represented as a movement primitive, for a given task descriptor called a context.
more
We propose a new method which enables robots to learn versatile and highly accurate skills in the contextual policy search setting by optimizing a mixture of experts model. We make use of Curriculum Learning, where the agent concentrates on local context regions it favors. Mathematical properties allow the algorithm to adjust the model complexity to find as many solutions as possible.
A video presenting our work can be found here.
more